
Challenger de los mares profundos -Deepsea Challenger
 Dibujo del DCV1, basado en imágenes del sitio web de Deepsea Challenger (no a escala)
|
|
| Historia | |
|---|---|
|
| |
| Nombre | Challenger de los mares profundos |
| Constructor | Acheron Project Pty Ltd |
| Lanzado | 26 de enero de 2012 |
| En servicio | 2012 |
| Estado | Activo a partir de 2018 |
| Características generales | |
| Escribe | Vehículo de inmersión profunda |
| Desplazamiento | 11,8 toneladas |
| Largo | 7,3 m (24 pies) |
| Potencia instalada | motor eléctrico |
| Propulsión | 12 propulsores |
| Velocidad | 3 nudos (5,6 km / h; 3,5 mph) |
| Aguante | 56 horas |
| Profundidad de prueba | 11.000 m (36.000 pies) |
| Complemento | 1 |
Deepsea Challenger (DCV 1) es un sumergible de inmersión profunda de 7,3 metros (24 pies)diseñado para llegar al fondo de Challenger Deep , el punto más profundo conocido de la Tierra. El 26 de marzo de 2012, el director de cine canadiense James Cameron pilotó la nave para lograr este objetivo en la segunda inmersión tripulada que alcanzó el Challenger Deep. Construido en Sydney , Australia por la empresa de investigación y diseño Acheron Project Pty Ltd, Deepsea Challenger incluye equipos de muestreo científico y cámaras 3D de alta definición; alcanzó el punto más profundo del océano después de dos horas y 36 minutos de descenso desde la superficie.
Desarrollo
Deepsea Challenger se construyó en Australia, en asociación con la National Geographic Society y con el apoyo de Rolex , en el programa Deepsea Challenge. La construcción del sumergible estuvo a cargo del ingeniero australiano Ron Allum . Muchos de los miembros del equipo de desarrolladores de sumergibles provienen de la fraternidad de buceo en cuevas de Sydney, incluido el propio Allum con muchos años de experiencia en el buceo en cuevas.
Trabajando en un pequeño taller de ingeniería en Leichhardt , Sydney, Allum creó nuevos materiales, incluida una espuma sintáctica estructural especializada llamada Isofloat, capaz de resistir las enormes fuerzas de compresión a una profundidad de 11 kilómetros (6,8 millas). La nueva espuma es única en el sentido de que es más homogénea y posee una mayor resistencia uniforme que otras espumas sintácticas disponibles comercialmente, pero, con una densidad específica de aproximadamente 0,7, flotará en el agua. La espuma está compuesta por esferas de vidrio huecas muy pequeñas suspendidas en una resina epoxi y comprende aproximadamente el 70% del volumen del submarino.
La fuerza de la espuma permitió a los diseñadores del Deepsea Challenger incorporar motores propulsores como parte de la infraestructura montada dentro de la espuma, pero sin la ayuda de un esqueleto de acero para montar varios mecanismos. La espuma reemplaza a los tanques llenos de gasolina para flotación como se usa en el histórico batiscafo Trieste .
Allum también construyó muchas innovaciones, necesarias para superar las limitaciones de los productos existentes (y actualmente en desarrollo para otros vehículos de alta mar). Estos incluyen propulsores llenos de aceite de presión equilibrada; Matrices de iluminación LED; nuevos tipos de cámaras; y cables de comunicación de penetración rápidos y fiables que permiten transmisiones a través del casco del sumergible. Allum ganó gran parte de su experiencia desarrollando la comunicación electrónica utilizada en las inmersiones del Titanic de Cameron en el rodaje de Ghosts of the Abyss , Bismarck y otros.
Los sistemas de energía para el submarino fueron suministrados por baterías de litio que estaban alojadas dentro de la espuma y se pueden ver claramente en las fotografías publicitarias del buque. Los sistemas de carga de baterías de litio fueron diseñados por Ron Allum. El sumergible contiene más de 180 sistemas a bordo, que incluyen baterías, propulsores, soporte vital, cámaras 3D e iluminación LED. Estos sistemas interconectados son monitoreados y controlados por un controlador de automatización programable (PAC) del fabricante de controles Opto 22 con sede en Temecula, California . Durante las inmersiones, el sistema de control también registró la profundidad, el rumbo, la temperatura, la presión, el estado de la batería y otros datos, y los envió al barco de apoyo a intervalos de tres minutos a través de un sistema de comunicación acústica subacuática desarrollado por la compañía de Australia Occidental L-3 Nautronix. .
Los elementos estructurales cruciales, como la columna vertebral y la esfera piloto que transportaba a Cameron, fueron diseñados por la empresa de Tasmania Finite Elements. El diseño del interior de la esfera, incluida la protección contra incendios, la gestión de la condensación y el montaje de los conjuntos de control, fue realizado por la consultora de diseño industrial con sede en Sydney Design + Industry.

Especificaciones
El sumergible cuenta con una esfera piloto que mide 1,1 metros (43 pulgadas) de diámetro, lo suficientemente grande para un solo ocupante. La esfera, con paredes de acero de 64 mm (2,5 pulgadas) de espesor, fue probada por su capacidad para soportar los 114 megapascales (16,500 libras por pulgada cuadrada ) de presión requeridos en una cámara de presión en la Universidad Estatal de Pensilvania . La esfera se encuentra en la base del vehículo de 11,8 toneladas (13,0 toneladas cortas ). El vehículo opera en posición vertical y lleva 500 kg (1,100 lb) de peso de lastre que le permite hundirse hasta el fondo y, cuando se suelta, subir a la superficie. Si el sistema de liberación de lastre falla, dejando varada la embarcación en el lecho marino, se diseñó una liberación galvánica de respaldo para corroerse en agua salada en un período de tiempo establecido, permitiendo que el submarino salga a la superficie automáticamente. Deepsea Challenger pesa menos de una décima parte del peso de su predecesor de cincuenta años, el batiscafo Trieste ; el vehículo moderno también lleva un equipo mucho más científico que Trieste , y es capaz de un ascenso y descenso más rápido.

Balizas y antenas, arriba
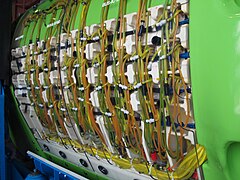
Matriz de baterías.

Uno de los propulsores.

Uno de los dos pesos de lastre principales.

La esfera piloto antes de la instalación.

Trampilla y ventana gráfica.

Esfera piloto, interior.







Inmersiones
Inmersiones tempranas
A fines de enero de 2012, para probar los sistemas, Cameron pasó tres horas en el sumergible mientras estaba sumergido justo debajo de la superficie en el Sydney Naval Yard de Australia. El 21 de febrero de 2012, una inmersión de prueba destinada a alcanzar una profundidad de más de 1000 m (3300 pies) fue abortada después de solo una hora debido a problemas con las cámaras y los sistemas de soporte vital . El 23 de febrero de 2012, justo al lado de la isla de New Britain , Cameron llevó con éxito el sumergible al fondo del océano a 991 m (3251 pies), donde se reunió con un vehículo amarillo operado a distancia operado desde un barco de arriba. El 28 de febrero de 2012, durante una inmersión de siete horas, Cameron pasó seis horas en el sumergible a una profundidad de 3.700 m (12.100 pies). Las fluctuaciones del sistema eléctrico y las corrientes imprevistas presentaron desafíos inesperados.
El 4 de marzo de 2012, una inmersión récord a más de 7.260 m (23.820 pies) se detuvo antes del fondo de la fosa de New Britain cuando problemas con los propulsores verticales llevaron a Cameron a regresar a la superficie. Días después, con el problema técnico resuelto, Cameron llevó con éxito el sumergible al fondo de la Fosa de New Britain, alcanzando una profundidad máxima de 8.221 m (26.972 pies). Allí, encontró una amplia llanura de sedimentos sueltos , anémonas , medusas y diversos hábitats donde la llanura se encontraba con las paredes del cañón.
Abismo Challenger
El 18 de marzo de 2012, después de abandonar el área de prueba en el mar de Salomón relativamente tranquilo , el sumergible estaba a bordo del buque de superficie Mermaid Sapphire , atracado en el puerto de Apra , Guam, en reparación y mejoras, y esperando un océano lo suficientemente tranquilo para llevar a cabo el bucear. El 24 de marzo de 2012, tras haber zarpado del puerto de Guam días antes, el sumergible estaba a bordo de uno de los dos buques de superficie que habían partido del atolón Ulithi hacia el Challenger Deep.
El 26 de marzo de 2012 se informó que había llegado al fondo de la Fosa de las Marianas .


El descenso, desde el inicio de la inmersión hasta la llegada al fondo marino, tomó dos horas y 37 minutos, casi el doble de rápido que el descenso de Trieste. Un reloj Rolex, "usado" en el brazo robótico del submarino, continuó funcionando normalmente durante la inmersión. No todos los sistemas funcionaron según lo planeado en la inmersión: los módulos de aterrizaje con cebo no se dejaron caer antes de la inmersión porque el sonar necesario para encontrarlos en el fondo del océano no funcionaba y los problemas del sistema hidráulico obstaculizaron el uso del equipo de muestreo. Sin embargo, después de aproximadamente tres horas en el lecho marino y un ascenso exitoso, se planeó una mayor exploración del Challenger Deep con el submarino único para más adelante en la primavera de 2012.
Registros
El 26 de marzo de 2012, Cameron llegó al fondo del Challenger Deep, la parte más profunda de la Fosa de las Marianas . La profundidad máxima registrada durante esta inmersión récord fue de 10,908 metros (35,787 pies). Medido por Cameron, en el momento del aterrizaje, la profundidad era de 10,898 m (35,756 pies). Fue la cuarta inmersión en el Challenger Deep y la segunda inmersión tripulada (con una profundidad máxima registrada ligeramente menor que la de Trieste en 1960). Fue la primera inmersión en solitario y la primera en pasar una cantidad significativa de tiempo (tres horas) explorando el fondo.
Eventos subsecuentes
Deepsea Challenger fue donado a la Institución Oceanográfica Woods Hole para los estudios de sus soluciones tecnológicas con el fin de incorporar algunas de esas soluciones en otros vehículos para avanzar en la investigación en aguas profundas. El 23 de julio de 2015, fue transportado desde la Institución Oceanográfica Woods Hole a Baltimore para ser enviado a Australia para un préstamo temporal. Mientras estaba en un camión de plataforma en la Interestatal 95 en Connecticut, el camión se incendió, lo que provocó daños al sumergible. La causa probable del incendio fue la falla de los frenos del camión que encendió sus neumáticos traseros. Los bomberos de Connecticut especularon que fue una pérdida total para el Deepsea Challenger ; sin embargo, no se informó la magnitud real del daño. El sumergible fue transportado de regreso a la Institución Oceanográfica Woods Hole después del incendio. En febrero de 2016, se había trasladado a California para su reparación.
Esfuerzos similares
En febrero de 2012, se están desarrollando varios otros vehículos para alcanzar las mismas profundidades. Los grupos que los desarrollan incluyen:
- Triton Submarines , una empresa con sede en Florida que diseña y fabrica submarinos privados, cuyo vehículo, Triton 36000/3 , llevará una tripulación de tres al fondo del mar en 120 minutos.
- Virgin Oceanic , patrocinado por Richard Branson 's Virgin Group , está desarrollando un sumergible diseñado por Graham Hawkes , Deepflight Challenger , con el que el piloto solitario se llevará a 140 minutos para llegar al fondo del mar.
- DOER Marine , una empresa de tecnología marina con sede en el área de la bahía de San Francisco establecida en 1992, que está desarrollando un vehículo, Deepsearch (y Ocean Explorer HOV Unlimited ), con el apoyo de Eric Schmidt de Google , con el que una tripulación de dos o tres tomará 90 minutos para llegar al fondo marino, según el programa Deep Search .
Ver también
- Expedición Challenger - Expedición de investigación oceanográfica (1872-1876)
- Exploración de aguas profundas : investigación de las condiciones físicas, químicas y biológicas del lecho marino
- Cronología de la tecnología de buceo : lista cronológica de eventos notables en la historia de los equipos de buceo submarino
Referencias
enlaces externos
-
 Medios relacionados con Deepsea Challenger en Wikimedia Commons
Medios relacionados con Deepsea Challenger en Wikimedia Commons -
Página web oficial

- Artículo sobre el uso de la dinámica de fluidos computacional durante el proceso de diseño del Deepsea Challenger
- Video de NGS: el regreso de Cameron de Challenger Deep
- Deepsea Challenge 3D en IMDb , undocumental de National Geographic Channel de 2014.